Pure Newton’s Method for Scalar Functions
Brad Magnetta
October 04, 2018

Say we have an unconstrained convex function \(f(x)\) that has an optimal value \(p^*\) when \(x=x^*\). If \(f(x)\) is twice differentiable we can try to use Newton’s method to find \(x\approx x^*\) through a recursive relation.
Key questions we must address
- How do we recursively update \(x\) to approach \(x^*\)?
- Answer: Standard descent methods use the following update term, \(x^{(k+1)}=x^{(k)}+t^{(k)}\Delta x^{(k)}\). While there is some freedom in our choice of \(t\) and \(\Delta x\), we must make sure that basic convex requirements hold; such as \(f(x^{(k+1)})<f(x^{(k)})\). What this means is that with each step we must be approaching a value of \(x\) that brings us closer to \(p^*\).
- How do we determine \(\Delta x_{nt}\)?
- Answer: \(\Delta x_{nt}=-\frac{f'}{f''}\). This choice minimizes the second order taylor expansion of \(f(x+\Delta x_{nt})\), solves the linearized optimality condition for \(f'(x+\Delta x_{nt})\), and is the steepest descent direction at x in local Hessian norm.
- How do we determine \(t\)?
- Answer: In our case we are considering the pure method so \(t=1\). However, we can use a line search method such as exact or back-tracking do solve for \(t\).
- How do we know when to stop?
- Answer: We define the decrement as \(\lambda = \sqrt{\frac{f'(x)^2}{f''(x)}}\) and choose a stopping criterion of \(\frac{\lambda^2}{2}\le \epsilon\).
Psuedo code for Newton’s Method
- Given:
- \(x_0\), \(x \in \mathrm{dom}(f)\)
- \(\epsilon\), \(\epsilon>0\)
- Repeat:
- Compute \(\lambda\) and \(\Delta x_{nt}\)
- Quit if stopping criterion is reached
- Determine \(t\)
- Update \(x\)
Code for Newton’s Method
Now it’s time to code this thing up. Although I’m using python I will be trying to use basic structures that can be universally coded using any language.
#--------------------------------
# Libraries
#--------------------------------
import sys
import numpy
import math
import matplotlib.pyplot as plt
#--------------------------------
# Modules
#--------------------------------
def f(x):
return math.log(2*math.cosh(x))
def d1_f(x):
#--- d1_f(x) = f'(x)
return math.tanh(x)
def d2_f(x):
#--- d2_f(x) = f''(x)
return (math.cosh(x)**(-1))**2
class Log:
k=[]
x=[]
fp=[]#f(x)-p*
def __init__(self,name):
self.name = name
def record(self,k,x,fp):
self.k.append(k)
self.x.append(x)
self.fp.append(fp)
def newton_method_pure(x0,p,kmax,e):
#print 'Running newton_method() ...'
log=Log('newton_method_pure')
log.record(0,x0,f(x0)-p)
k=1 #initialize step number
x=x0 #initialize x
t=1 #required for pure case
while k<kmax:
lamb = math.sqrt((d1_f(x)**2)/d2_f(x))
if (lamb**2)/2 <= e:
#print '... stopping criterion reached'
break
x_step = -(d1_f(x)/d2_f(x))
x += t*x_step
log.record(k,x,f(x)-p)
k+=1
return log
#--------------------------------
# Main
#--------------------------------
if __name__ == "__main__":
#---------------------------------
# Visualize functions
#---------------------------------
x = [-2.+0.1*float(i) for i in range(0,40)]
plt.plot(x,[f(y) for y in x])
plt.plot(x,[d1_f(y) for y in x])
plt.plot(x,[d2_f(y) for y in x])
plt.title('functions for pure newton')
plt.legend(['f(x)','d1_f(x)','d2_f(x)'])
plt.show()
plt.clf()
#---------------------------------
# Run Solver
#---------------------------------
x0=1.0
x_opt=0.0
p=f(x_opt)
kmax=10
e=0.000001
log=newton_method_pure(x0,p,kmax,e)
plt.plot(log.k,log.fp)
plt.yscale('log')
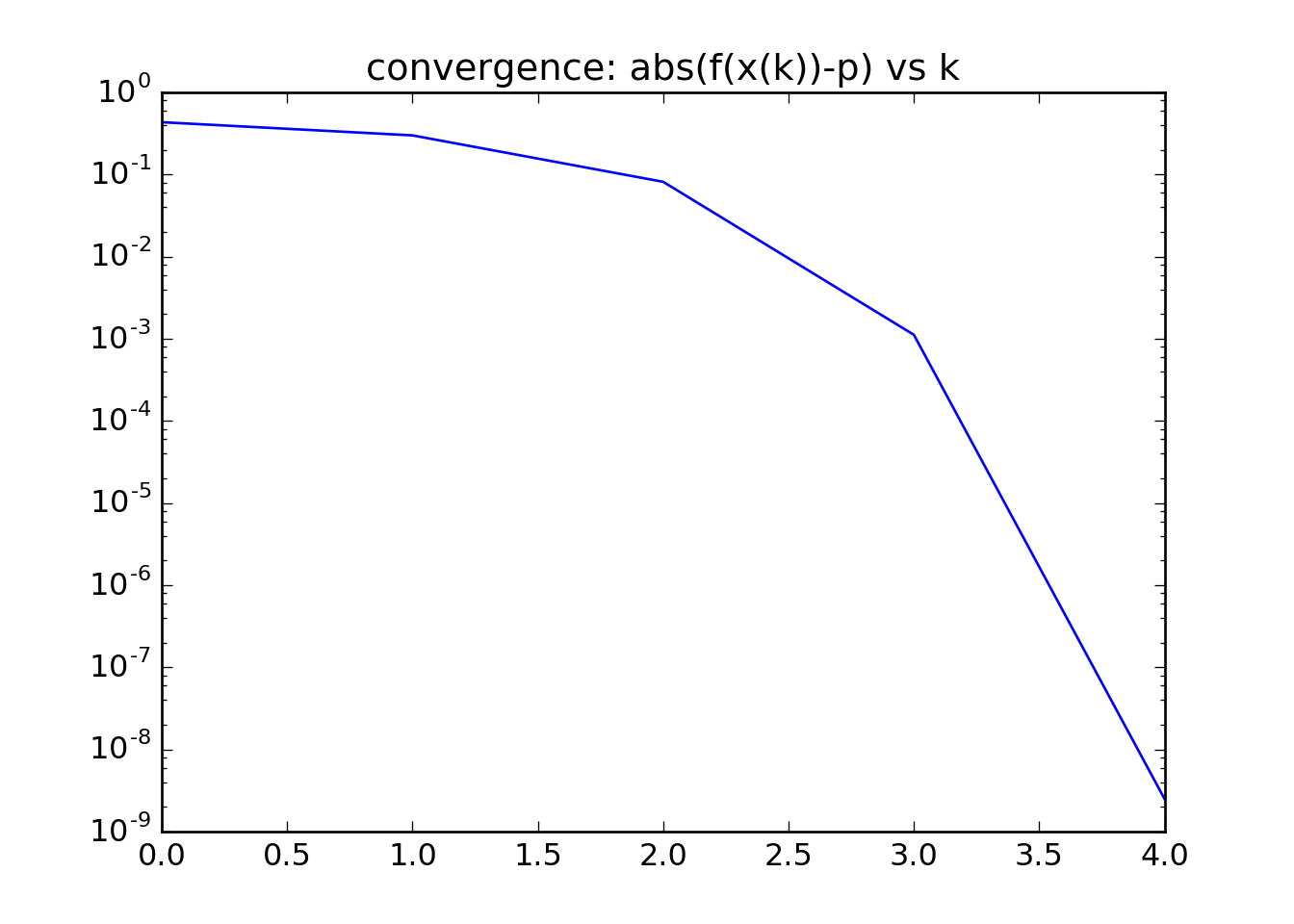
plt.title('convergence: abs(f(x(k))-p) vs k')
plt.show()
plt.clf()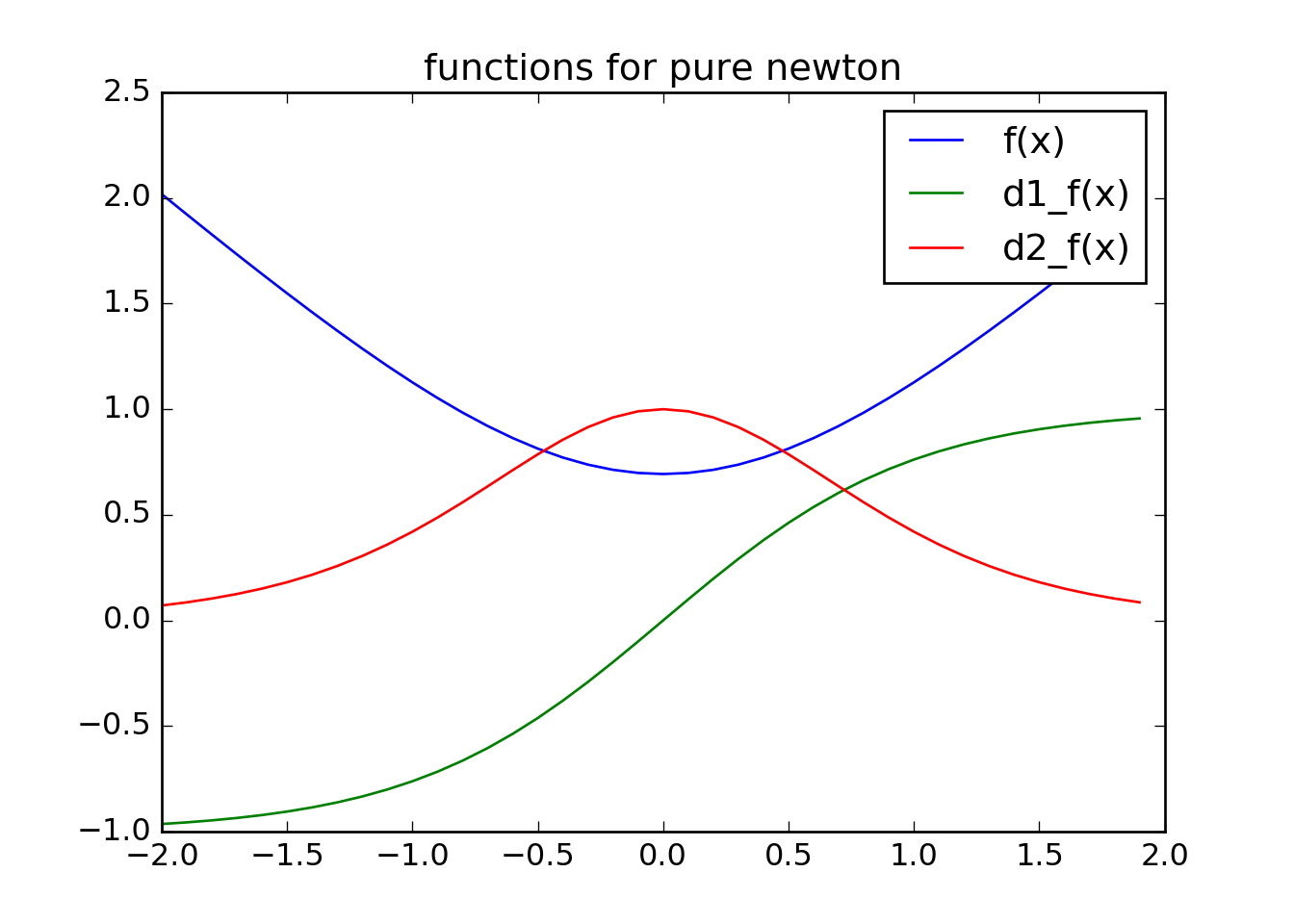

Analyzing our output
The pure newtons method requires the step length be \(t=1\). We can determine \(t\) using exact or back-tracking methods by adding in a sub-step to our code.
Visually we see that \(f(x)\) is indeed convex. If not this solver will not work.
In this case we can use our plots to identify what \(p^*\) and \(x^*\) are.
We desire quadratic convergence between the function at each step and the optimal value.
Quadratic convergence only occurs when we are close to the optimum solution. This is a major problem with Newtons method, and is illustrated by changing our initial point from 1.0 to 1.1. Try this out for yourself.
Changing things up
- Change modules for \(f(x)\), \(f'(x)\), and \(f''(x)\). This will require changes in \(x_0\) and \(p\).